FEM08-广义坐标有限元
简介
“FEM07-从虚位移原理到有限元”介绍了有限元法求解线性结构问题的基本流程,该方法的关键在于构造位移插值矩阵H。本文以平面应力单元为例,介绍运用广义坐标(Generalized Coordinate)构造位移插值矩阵H的方法以及有限元求解过程。
例题
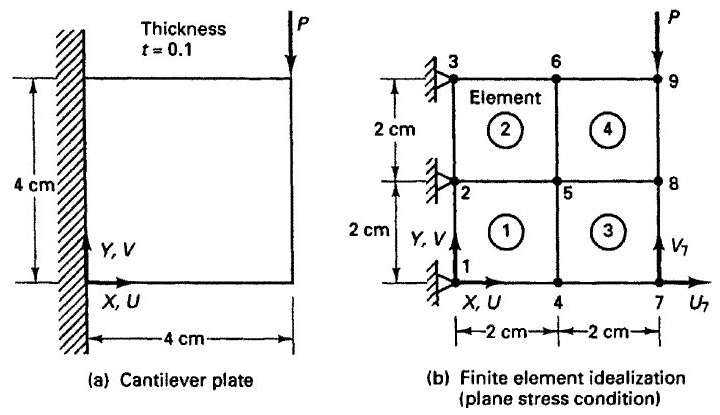
如图所示的悬臂板处于平面应力(plain stress)状态,划分为4个四边形单元。试建立2号单元的位移插值矩阵H、应变-位移矩阵B和材料属性矩阵C。
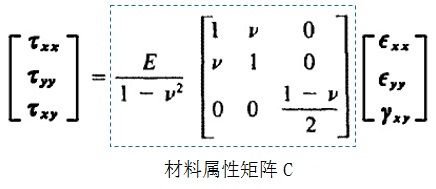
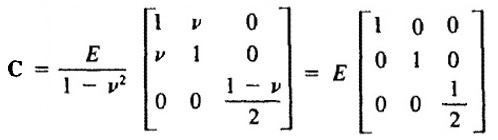
平面应力状态,只包含τxx, τyy, τxy三个应力分量。对于各向同性线弹性材料,其应力应变关系满足广义胡克定律,得到材料属性矩阵C.
2号单元内部的位移分布,由插值矩阵H乘以节点位移U得到。
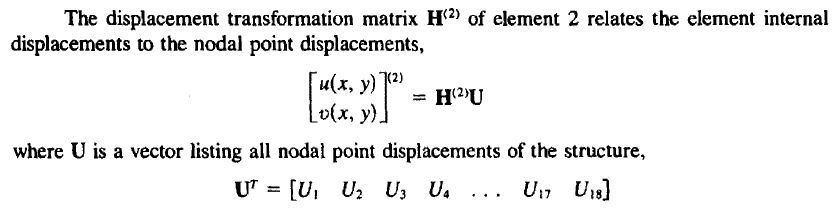
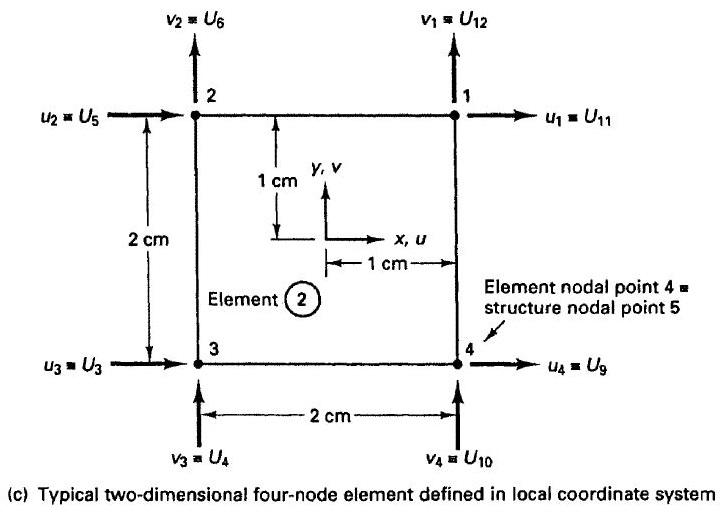
只有6、3、2和5这四个节点的位移会影响2号单元内的位移分布。为了便于计算,以单元中心为原点建立单元局部坐标系,自由度方向与全局坐标系一致,并对该单元的节点重新编号,依次为1、2、3和4。那么,2号单元的节点位移Û可写作:

在单元局部坐标系中,采用如下多项式函数来构造单元内的位移函数u(x, y)和v(x, y):
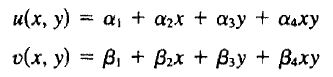
其中的未知系数α1,……,α4, β1,……,β4称为广义坐标,将它们写成向量的形式:

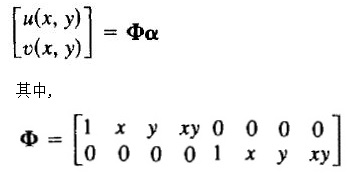
单元内的位移函数可用矩阵描述:
单元的四个节点处,都应满足位移函数,将这四个节点的坐标分别代入位移函数,得到:
u1=u(1,1)=α1+α2+α3+α4; v1=v(1,1)=β1+β2+β3+β4
u2=u(-1,1)=α1-α2+α3-α4; v2=v(-1,1)=β1-β2+β3-β4
u3=u(-1,-1)=α1-α2-α3+α4; v3=v(-1,-1)=β1-β2-β3+β4
u4=u(1,-1)=α1+α2-α3-α4; v4=v(1,-1)=β1+β2-β3-β4
写成矩阵形式,即:
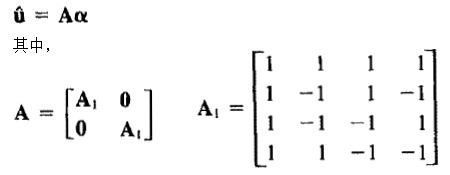
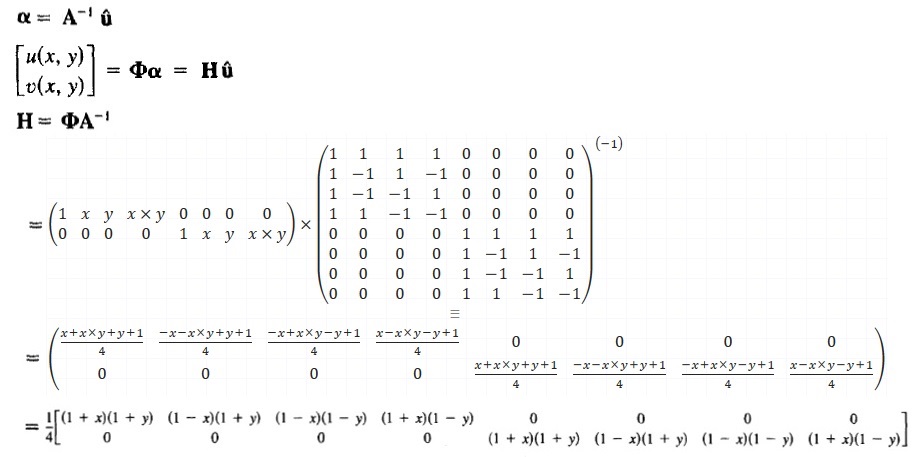
将广义坐标用节点位移表示,代入位移函数,可以求出位移插值矩阵H:
平面应力状态的三个应变分量为:εxx, εyy, γxy:

应变-位移矩阵B可以由H推导出来。

最后再把单元节点的局部自由度和全局自由度对应起来,即可写出2号单元关于全局自由度的位移插值矩阵H和应变-位移矩阵B。
给定:杨氏模量E =2700000,泊松比ν=0,板厚t = 0.1,载荷P=100;求各个节点的位移。
对于该网格模型中的任何一个单元m,分别建立元局部坐标系。将其节点从右上角开始,沿逆时针方向依次编号:1、2、3和4。每个单元的节点位移向量都可记为:
ν=0,材料属性矩阵C:
每个单元的刚度矩阵K(m):
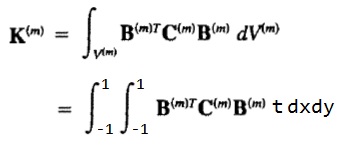
其中BTCB矩阵计算如下。
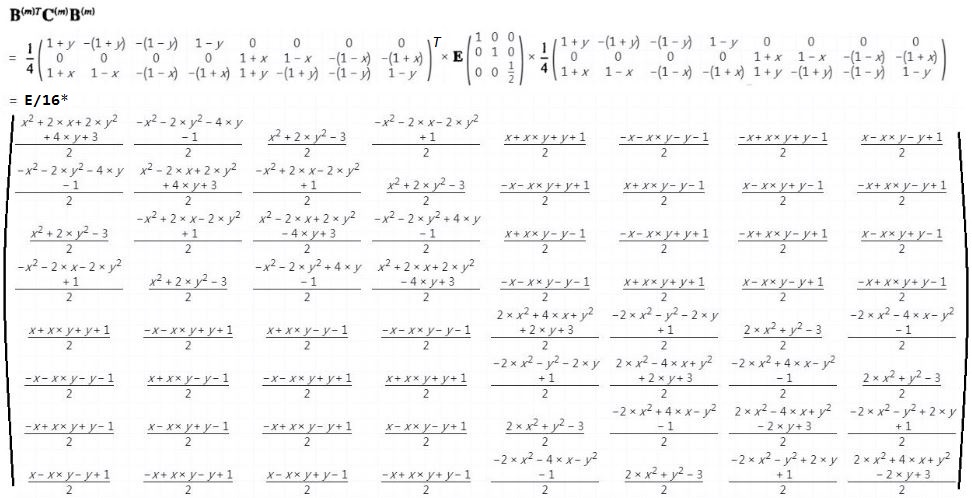
该矩阵各项元素分别在单元域内对x和y进行双重积分,可以求出单元刚度矩阵。求积分可以参考Wolfram|Alpha网站中的小程序:“https://www.wolframalpha.com/widgets/view.jsp?id=f5f3cbf14f4f5d6d2085bf2d0fb76e8a”
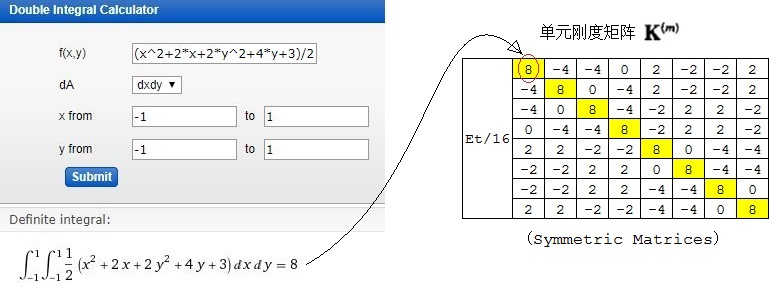
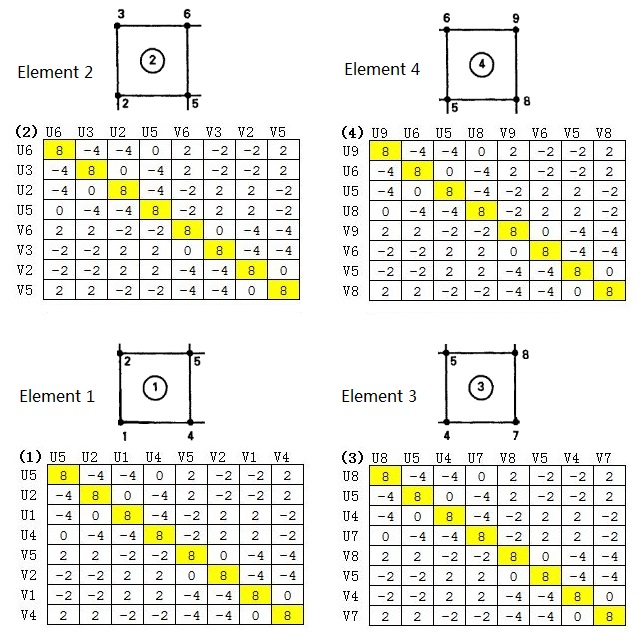
由于本例中每个单元的几何尺寸、材料属性和插值函数都一样,所以每个单元刚度矩阵也都是一样的。只不过每个单元节点相关的全局自由度不同。各个单元刚度矩阵及对应的自由度如下:(省略了常数Et/16)
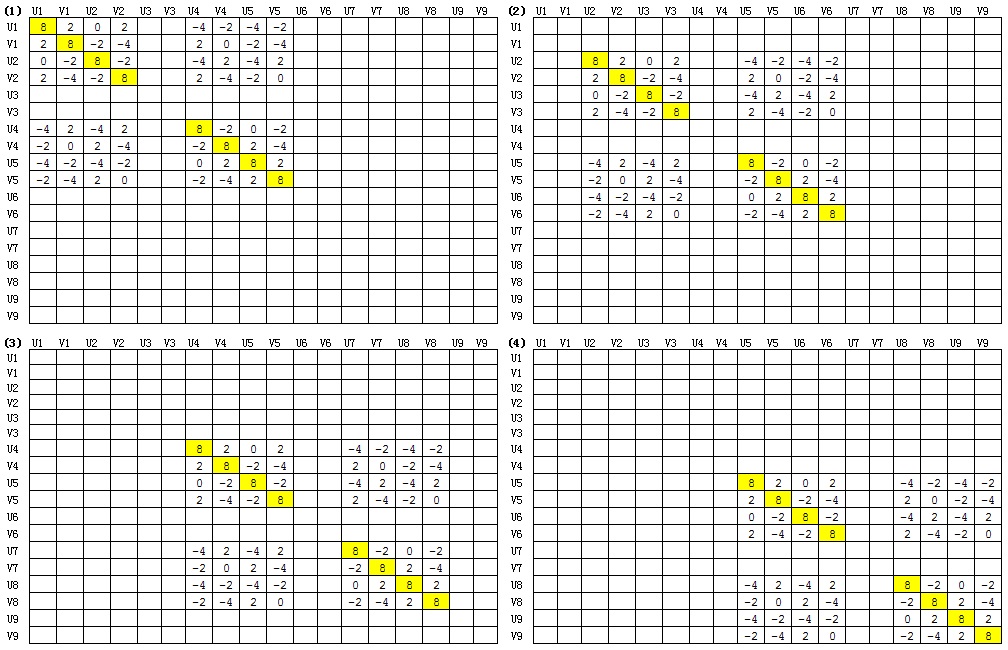
全局自由度中与某个具体单元无关的部分用0补充,得到每个单元关于全局自由度的刚度矩阵。
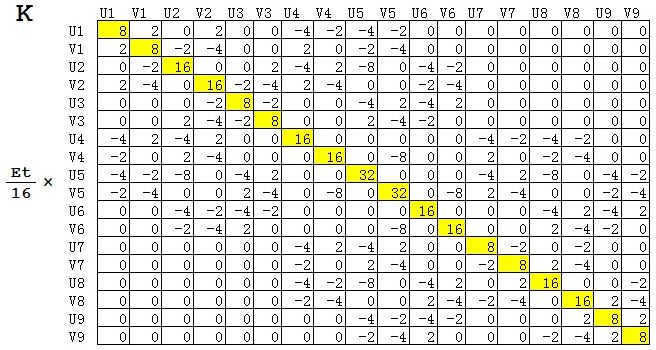
然后进行组装,得到总体刚度矩阵。
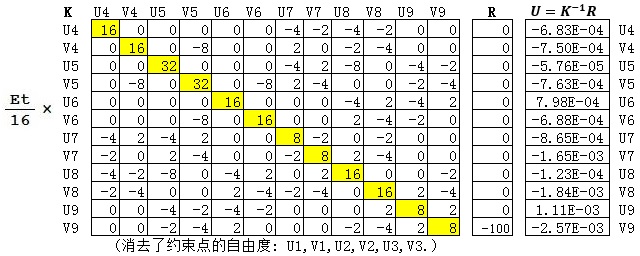
根据约束条件,消去节点1、2、3对应的所有自由度。根据载荷条件,写出载荷向量R。根据KU=R,即可求出各个节点的位移。
Reference:
- Finite Element Procedures by Klaus-Jürgen Bathe 轩建平 译
- A First Course in Finite Elements by Jacob Fish & Ted Belytschko